
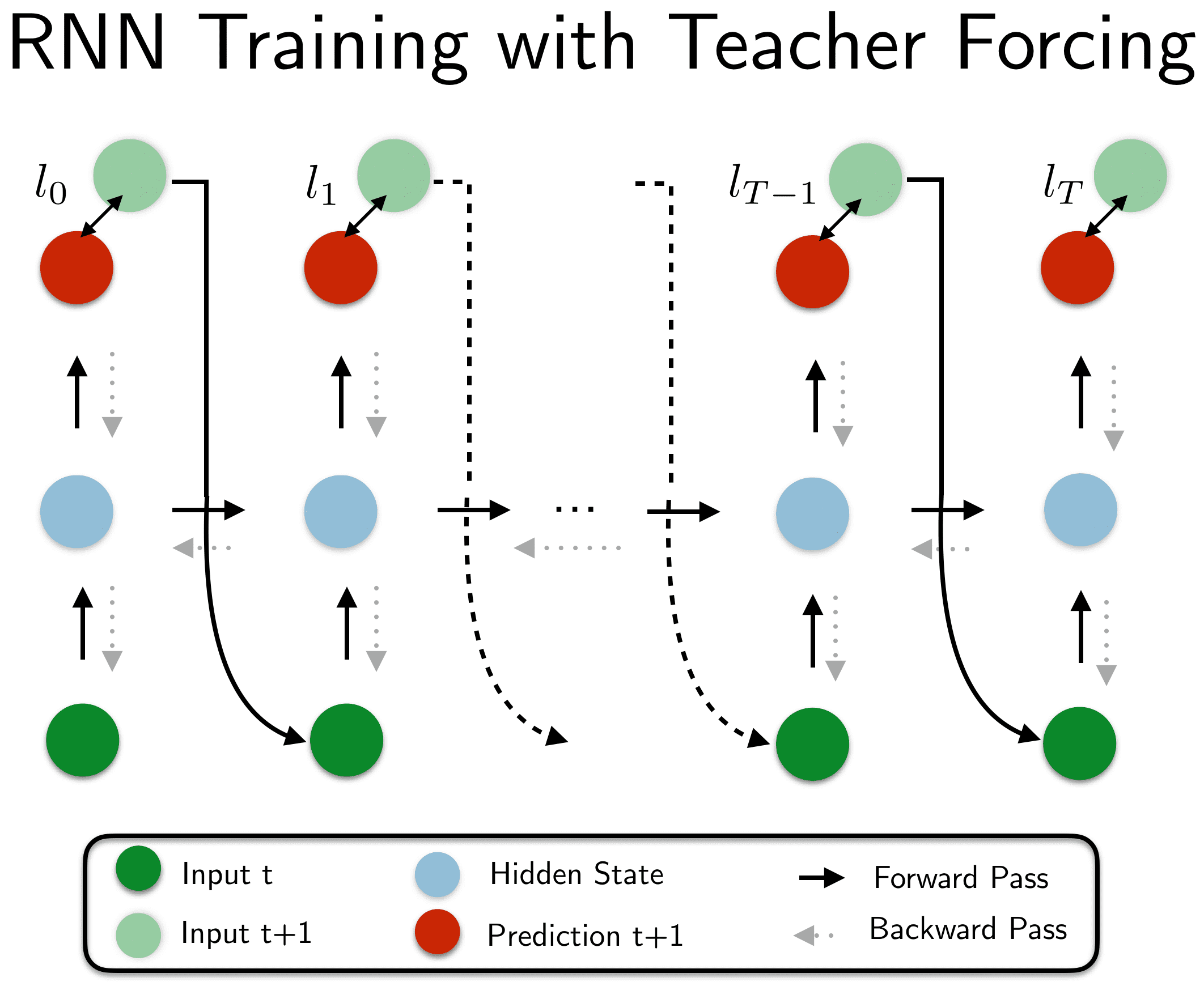
Training an RNN with teacher forcing.
20200608182759
Teacher forcing is a (really simple) way of #training an #rnn.
RNNs have a variable length input and this is by design, since this is why they are mainly used (to convert a sequence - like text - into a single encoding - #embedding).
The problem
Suppose you have the input: (w0, w1, w2, ..., wn)
What you normally would do for training, maybe in a naive way, is to #autoregress, which means sending all the tokens of the input into the RNN and compute the loss as the result you get at the very end, then backpropagate through time, for all the steps with their relative partial-losses.
If you are in a #seq2seq model (say in #language_models or #machine_translation), where you want to predict a sequence, derived from the input sequence, doing the above ends you up with the following (logically unrolled) algorithm:
- Forward pass:
- passing
w0into the RNN model and getting a predictionp0.- this makes the RNN pass to a new state
s0to reflect the output you just sent
- this makes the RNN pass to a new state
-
(internally) compute the partial-loss
l0: betweenp0and the expected answere0 - send in the next token
w1into the RNN model and getting a predictionp1 -
(internally) compute the partial-loss
l1: betweenp1and the expected answere1 - .… (repeat n times for all
w_i)
- passing
-
after all these steps, you now have the output prediction
(p0, p1, p2, ..n, pn), which you want to train so as to be as close as possible to the target (expected) sequence(t0, t1, t2, ..., tn) - Backwards pass:
- backpropagate through time, using each
l_ias the loss value for each timestep you’re at
- backpropagate through time, using each
So you have:
(w0, w1, w2, ..., wn)- inputs(p0, p1, p2, ..., pn)- outputs(t0, t1, t2, ..., tn)- targets(l0, l1, l2, ..., ln)- partial-loss values
In this formulation, notice that p1 is only as good as p0 was, because p1 used the RNN that yielded p0. Since usually, p0 is way off (especially at the beginning of training) then p1, p2 and the following have a increasingly smaller chance to land on the correct outputs (because they depend on the previous erroneous states).
Teacher forcing
To overcome this, you actually need not continue on step i from the intermediary state i-1 (that yields p_i) but from a state that received all the correct inputs, up to the current one. In other words, we need to make p_i dependent on the sequence(t0, t1, t2, ..., t(i-1)) not on (p0, p1, p2, ..., p(i-1)).
Let’s take an example. Suppose we want to predict the next word in the sequence (I, am, new) which is at.
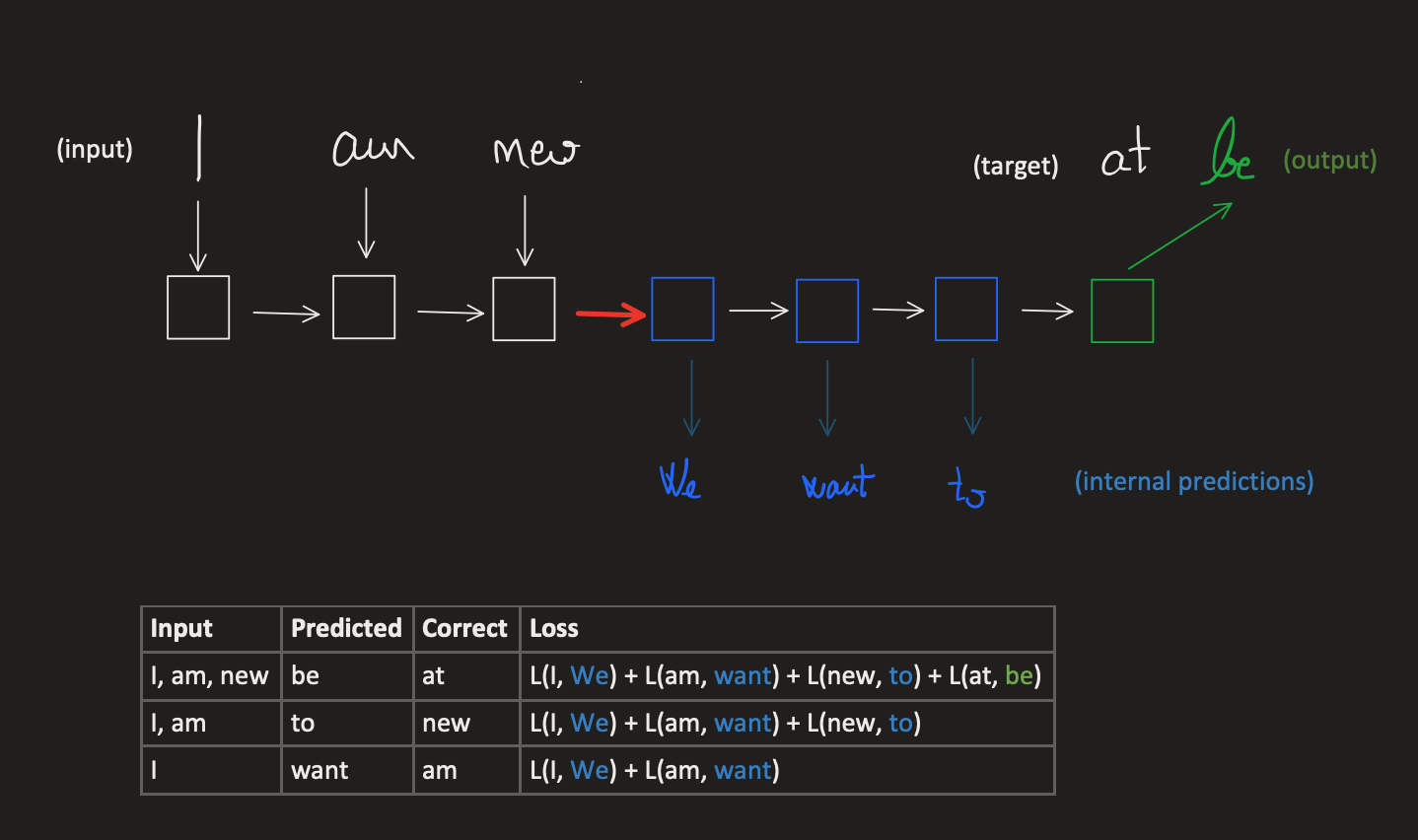
What would normally happen is that you’d pass all the words into the RNN I, am, new and let the RNN build up an internal state representing this sequence, into an internal state (the red arrow above) and and then unroll this hidden state for 3 steps to get the final output.
Internally, at each unrolling step you actually get some intermediary predictions (in blue) and they depend on what the RNN unrolled previously in step (t-1). This means that since We was a wrong prediction, want may be sensible as a next word, given We as a prior, but for the full sequence, it builds up on the previous error. By the time, we get to the output, we have accumulated all the errors of:
- predicting
be, which depended on the error of predicting previously bothWeandwantandto - predicting
towhich depended on the error of predicting previously bothWeandwant - predicting
wantwhich depended on the error of predictingWe
To correct these issues, the backpropagtion step has to compute the loss values as cummulative sums of all the loss values of previous predictions (#”backpropagation through time” #bptt).
Teacher forcing solves this by sending in all the correct predictions as priors, and only deal of forcing (correcting) a single step of the output. It’s as if, we are sending cummulative sequences as inputs, and expect the next token and only backpropagate for that loss value, as you can see in the image bellow.
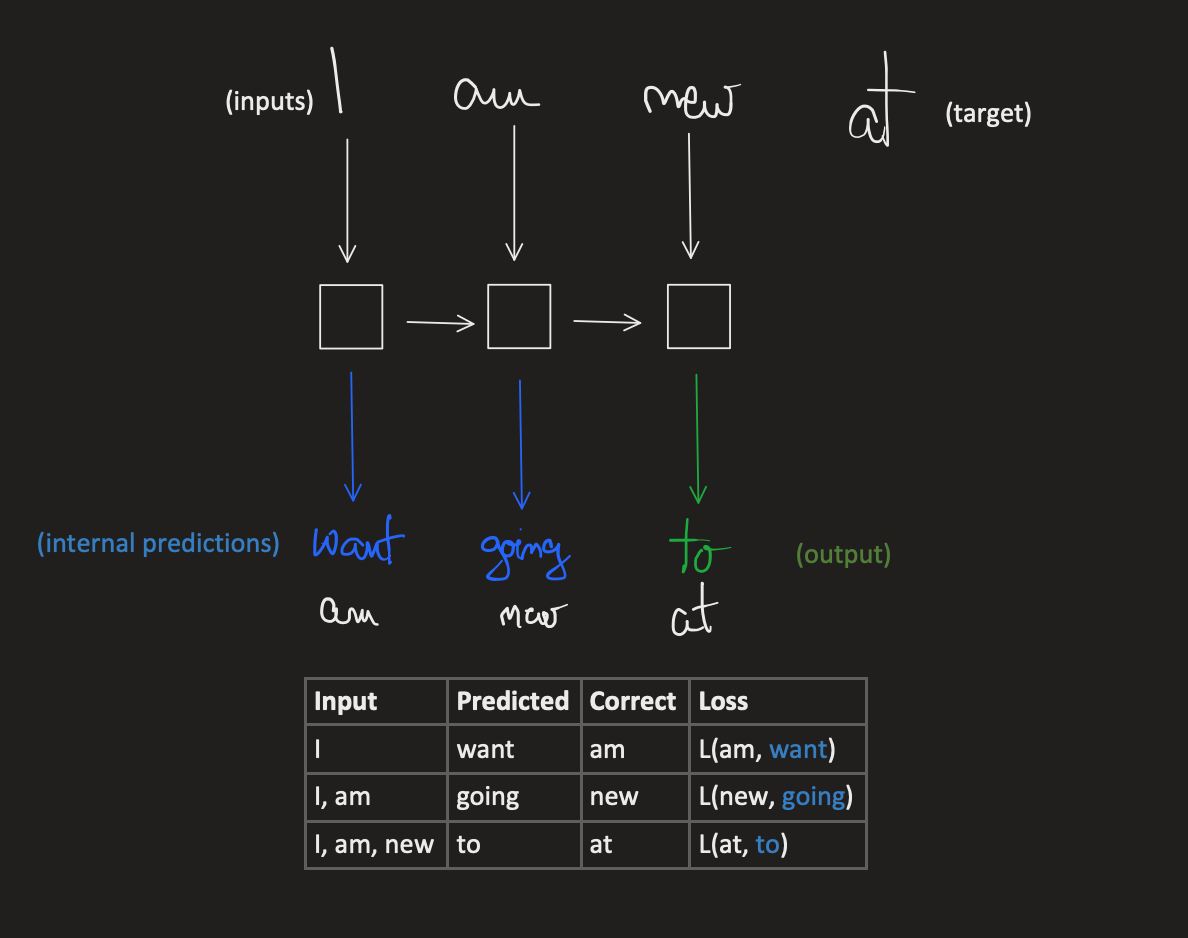
So, we compute the intermediary predictions, we act on their errors (through backpropagation) but only once, since from that point forward we’ll make next tokens depend on the correct previous tokens.
This speeds up training because now we have a linear training schedule, one word at a time.
Basically, if we have a sequence ['I', 'am', 'new'] with should predict at then we need to train the network with the following batch:
['I'] -> 'am'['I', 'am'] -> 'new'['I', 'am', 'new'] -> 'at'
This is sometimes also called sequence learning
See also:
Comments